...erforsche: Kann der Roboter auswendig lernen?
Dein Spurensucher kann exakt einer Linie nachfahren. Es waren quasi Reflexe im Rückenmark: Er hat also Augen (LDR) und Muskeln (Motoren). Nun erhält er auch noch ein Hirn in Form eines Minicomputers.
...erforsche: Kann der Roboter auswendig lernen?
Dein Spurensucher kann exakt einer Linie nachfahren. Es waren quasi Reflexe im Rückenmark: Er hat also Augen (LDR) und Muskeln (Motoren). Nun erhält er auch noch ein Hirn in Form eines Minicomputers.
...explore: Le robot peut-il apprendre par cœur ?
Ton chercheur de trace peut suivre exactement une ligne. C'était comme des réflexes dans la moëlle épinière: il a donc des yeux (LDR) et des muscles (moteurs). Maintenant, il a aussi un cerveau sous la forme d'un mini-ordinateur.
...explore: Can a robot learn by heart ?
Your trace-seeker can follow a precise lign. As reflexes in the spine: it has eyes (LDR) and muscles (motors). It now also has a brain in the form of a mini computer.

1
![]()
Lade die App auf dein Handy oder Tablet
Melde dich im Apple-Store oder im Play-Store an.
Suche die explore-it - Robo- App «explore-it Robotics» und lade sie herunter.
Wenn du die App nicht findest oder nicht installieren kannst, liegt es vielleicht daran, dass das Betriebssystem deines Gerätes zu alt ist.
Für Apple-Geräte braucht es IOS 9.0 oder höher, für Android-Geräte 4.3 oder höher.
1
![]()
Télécharge l'application sur ton téléphone ou ta tablette
Connecte-toi à l'Apple Store ou au Play Store.
Recherche l'application « explore-it robotics » et télécharge-la.
Si tu ne peux pas trouver ou installer l'application, c'est peut-être parce que le système d'exploitation de ton appareil est trop ancien.
Pour les appareils Apple, il faut IOS 9.0 ou supérieur, pour les appareils Android 4.3 ou supérieur.
1
![]()
Download the application on your smartphone or a tablet.
Login to Aplle Store or Play Store.
Search for the app « explore-it robotics » and download it.
If you can't find or install it, maybe your opperation system is too old.
For Apple, you need IOS 9.0 and above, for Android 4.3 or above.

2
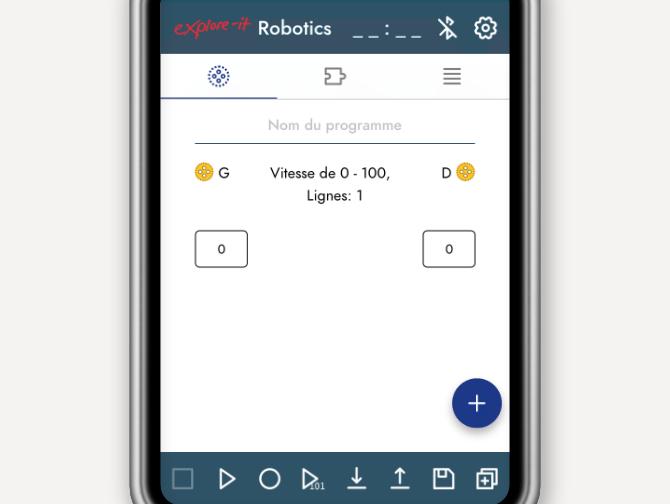
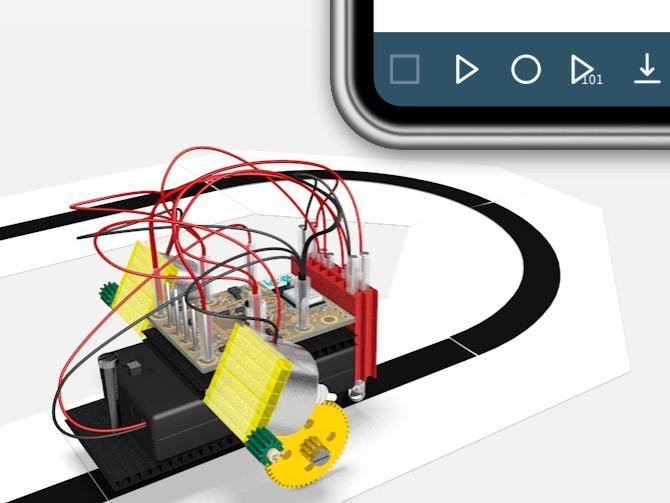
Starte die App.
Wenn du dieses Bild siehst, bist du bereit, den Minicomputer auf deinem Spurensucher zu montieren.
Vielleicht erhältst du eine Warnung, dass "Bluetooth" eingeschaltet werden muss.
Bei Android-Geräten musst du auch "Standort" freigeben, damit du die App benützen kannst, obwohl der Standort deines Handys nicht bestimmt wird.
2
Lance l'application.
Lorsque tu vois cette image, tu es prêt à monter le mini-ordinateur sur ton chercheur de trace.
Il se peut que tu reçoives un avertissement indiquant que "Bluetooth" doit être activé.Sur les appareils Android, tu devras également activer la fonction "Localisation" pour pouvoir utiliser l'application même si elle ne détermine pas la position de ton téléphone.
2
Open the app.
As you see the image, you're ready to fit your mini-computer on your trace-seeker.
You may receive a notice to activate your Bluetooth. On Android, you will also need to activate the "localisation" function to use the app, eventhough it doesn't your phone's position.
3
![]()
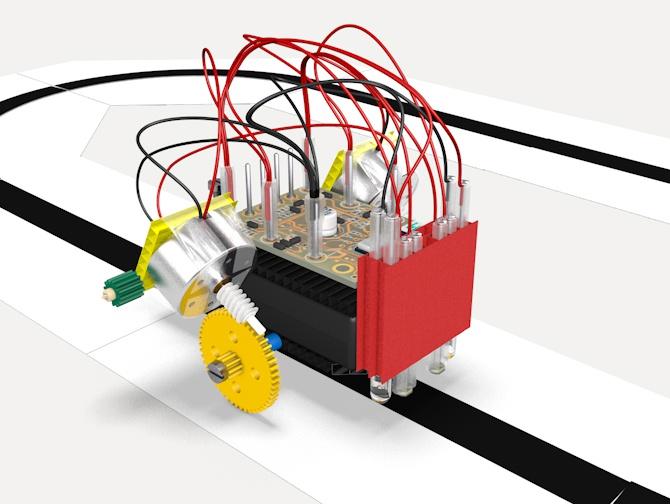
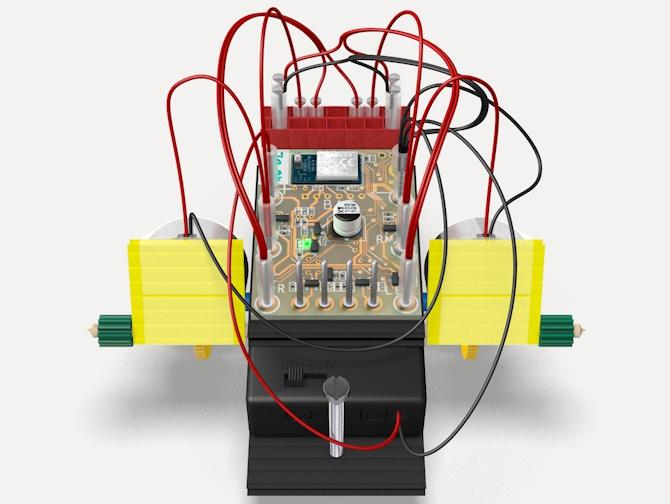
Montiere den Minicomputer auf deinem Spurensucher
Wenn du den Minicomputer auf deinem Spurensucher montiert hast, wird der Spurensucher zum Roboter.
3
![]()
Monte le mini-ordinateur sur ton chercheur de trace
Une fois que tu as monté le mini-ordinateur sur ton chercheur de trace, celui-ci devient un robot.
3
![]()
Fit your mini-computer on your track-follower
Once you've fitted your mini-computer on your trace-seeker, it becomes a robot.
4
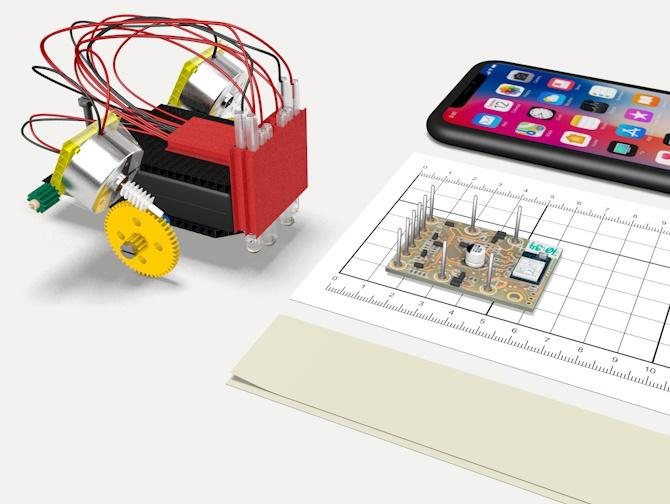
Material:
Minicomputer (Leiterplatte)
Doppelklebebandstreifen
Spurensucher
Handy oder Tablet
Silikonschlauch
Rasterblatt
4
Matériel:
Mini-ordinateur (circuit imprimé)
Ruban adhésif double face
Chercheur de trace
Téléphone portable ou tablette
Tube en silicone
Feuille quadrillée
4
Material:
Mini-computer (printed circuit board)
Double sided tap
Track-follower
Smartphone or Tablet
Silicone tube
Checkered sheet
5
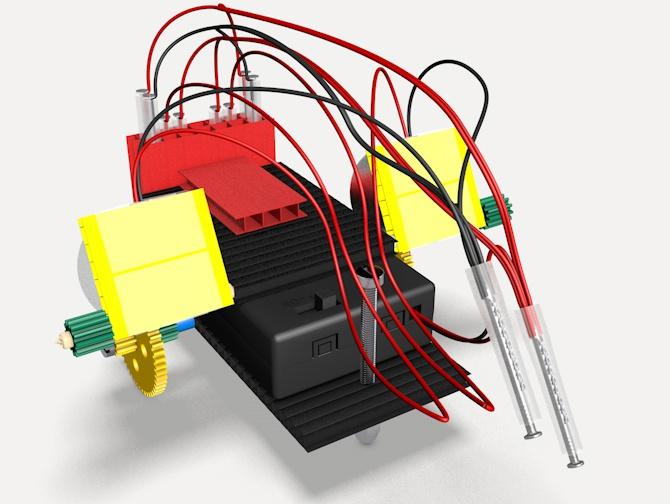
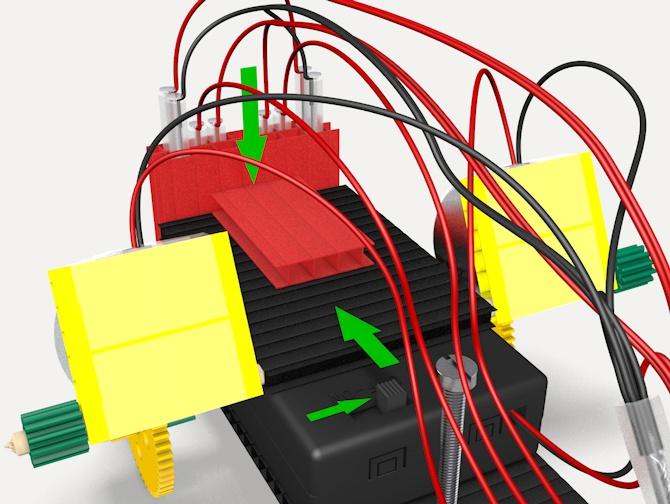
Ziehe alle Kabel aus dem Hohlkammerplattenstück.
5
Tire tous les câbles hors de la pièce de la plaque alvéolaire.
5
Remove all cables out of the alveolar pannel.
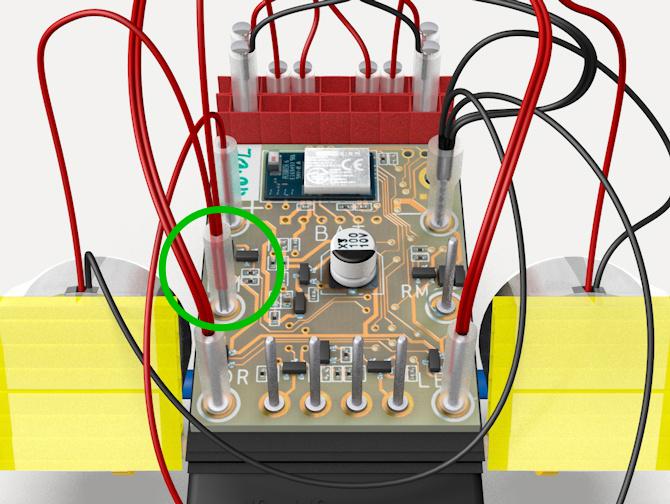
6
Schiebe den Schalter des Batteriehalters auf «OFF».
Öffne den Batteriehalter, indem du auf der hinteren Seite des Spurensucher drückst und gleichzeitig das obere Element nach vorne schiebst (beachte die grüne Markierung).
6
Mets l'interrupteur du porte-piles sur "OFF".
Ouvre le porte-piles en appuyant sur l'arrière du chercheur de trace tout en faisant glisser l'élément supérieur vers l'avant (voir la flèche verte).
6
Set the switch on the battery case on "OFF".
Open the battery case by pressing on the back of the track-follower while sliding the upper piece forwards (green arrow).

7
Entferne die Schraube und lege eine Batterie ein. Achte auf die Bezeichnung der Pole der Batterie.
Verschliesse den Batteriehalter wieder. Vielleicht musst du etwas auf die vordere Kante des Batteriehalters drücken.
7
Retire la vis et insère une pile. Fais attention aux pôles de la batterie.
Referme le porte-piles. Tu devras peut-être appuyer un peu sur l’avant du porte-piles.
7
Remove the screw and insert a battery. Pay attention to the battery pole.
Close the battery case. You may need to press a little on the front of the battery case.
8
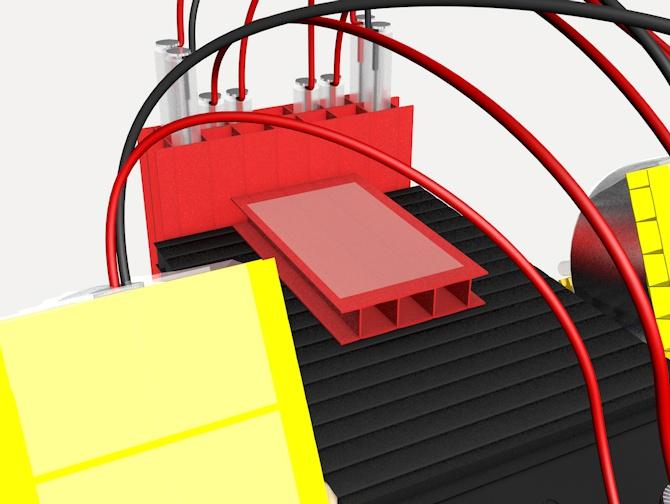
Klebe ein 1.5 cm breites Stück Doppelklebeband auf das rote Hohlkammerplattenstück. Löse die Schutzfolie ab.
8
Colle un morceau de ruban adhésif double face de 1,5 cm de large sur la plaque alvéolaire.
Retire le film de protection.
8
Put a 1.5 cm large double sided tape piece on the alveolar pannel.
Remove the protection film.
9
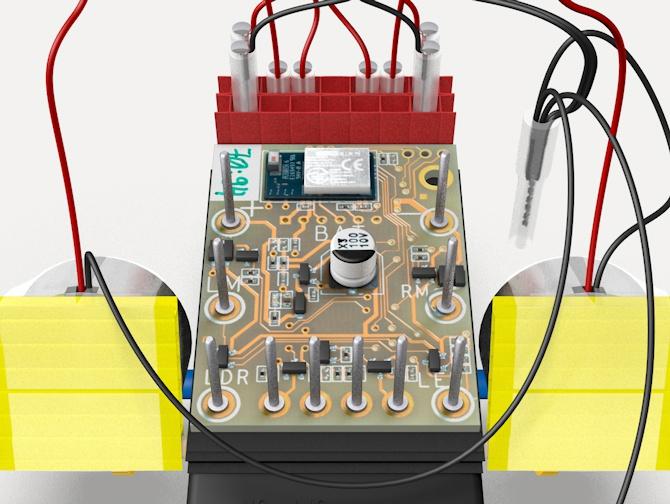
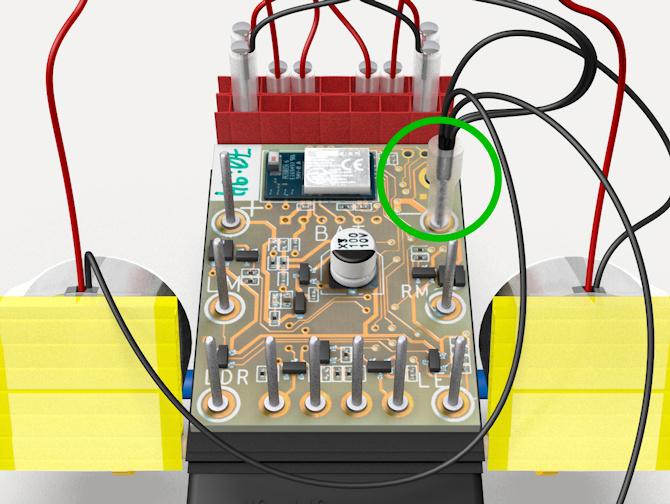
Klebe den Minicomputer (Leiterplatte) auf das Hohlkammerplattenstück. Achte darauf, dass die Leiterplatte genau in der Mitte ist und die Lichtsteuerung berührt.
Achtung: Die Reihe mit den 6 Stiften ist hinten.
9
Colle le mini-ordinateur (circuit imprimé) sur la pièce de la plaque alvéolaire. Assure-toi que le circuit imprimé se trouve exactement au milieu et qu'il touche le pilotage de lumière.
Attention : La rangée avec les 6 broches se trouve à l'arrière.
9
Stick the mini-computer (p.c. board) on the alveolar pannel. Make sure it is exactly in the centre and touches the light command.
Attention : The row with the 6 pins is at the back.
10
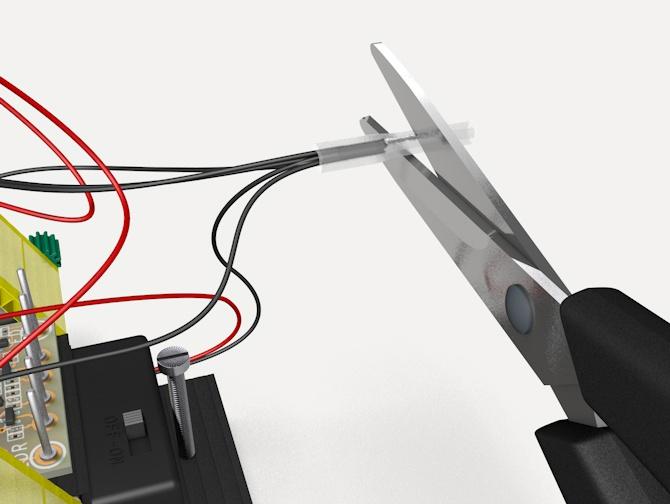
Entferne den Nagel bei den schwarzen Kabeln.
Schiebe die schwarzen Kabel möglichst tief in den Silikonschlauch hinein. Das geht am besten, wenn du die Kabel drehst und dabei in den Schlauch drückst.
Verkürze den Silikonschlauch zusammen mit den Drähten auf 1.5 cm.
10
Enlève le clou des câbles noirs.
Insère les câbles noirs le plus profondément possible dans le tube en silicone. La meilleure façon de procéder est de tordre les câbles et de les pousser dans le tube.
Raccourcis le tube en silicone ainsi que les fils à 1,5 cm.
10
Remove the nail from the black cables.
Insert the black cables as far as possible in the silicone tube. The best way is to twist the wires and push them in the tube.
Shorten the silicone tube and the wire to 1.5 cm.
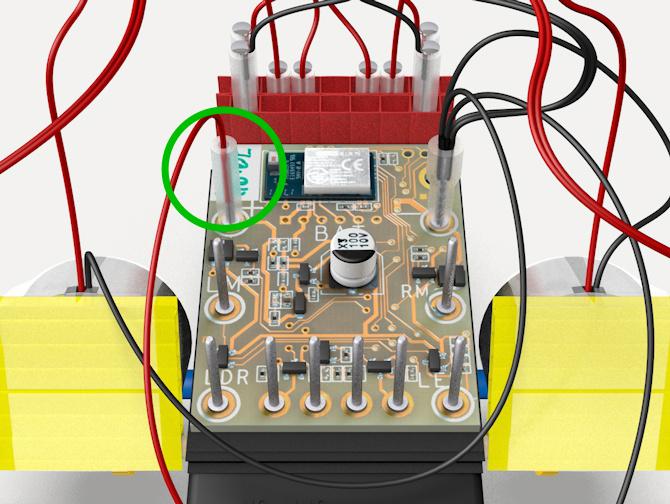
11
Stecke den Silikonschlauch mit den schwarzen Kabeln auf den «- BAT» – Stift der Leiterplatte.
11
Branche le tube en silicone avec les fils noirs sur la broche "BAT" du circuit imprimé.
11
Connect the silicone tube with the black cables to the "BAT" pin on the printed circuit.
12
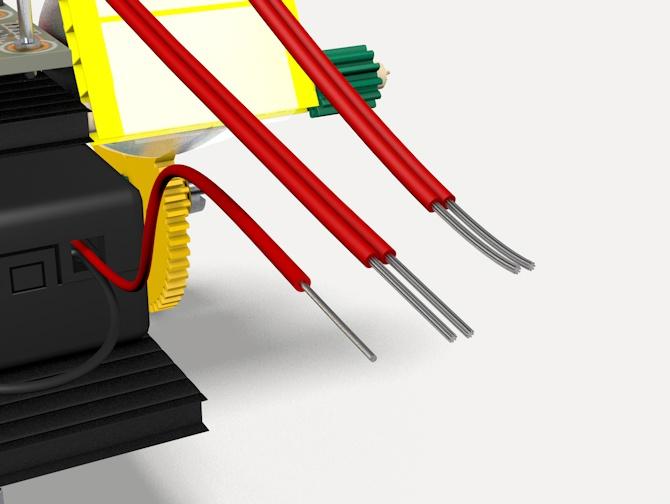
Entferne den Nagel bei den roten Kabeln.
Ziehe die roten Kabel aus dem Silikonschlauch.
Drehe die roten Kabel auseinander, so, dass du zwei Doppellitzen und eine Einfachlitze hast.
12
Retire le clou des câbles rouges.
Retire les fils rouges du tube en silicone.
Torsade les câbles rouges de manière à obtenir deux brins doubles et un brin simple.
12
Remove the nail from the red cables.
Remove the red cables from the silicone tube.
Twist the wires to obtain two double strands and one single strand.
13
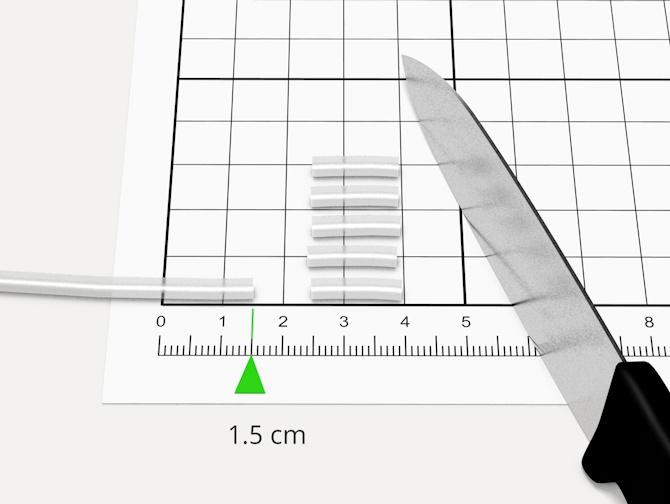
Schneide 5 Stücke Silikonschlauch von 1.5 cm Länge ab.
13
Coupe 5 morceaux de tube en silicone de 1,5 cm de long.
13
Cut 5 pieces of silicone tube of 1.5 cm long.
14
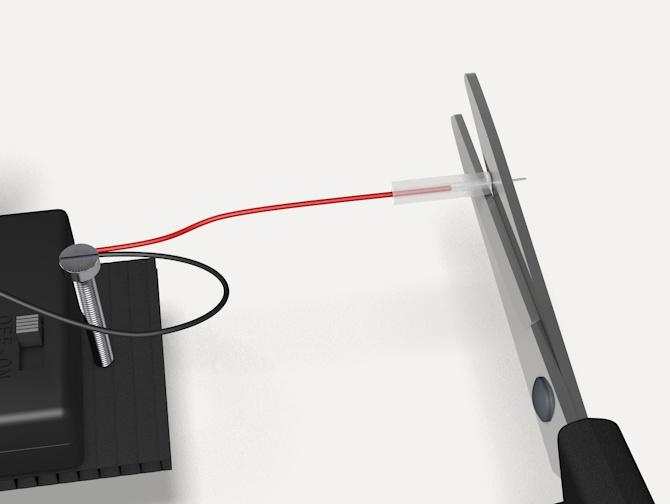
Stecke auf das rote Kabel des Batteriehalters ein 1.5 cm langes Stück Silikonschlauch bis die Isolation in der Hälfte des Silikonschlauchs ist.
Schneide die herausstehenden Drähtchen ab.
14
Mets un morceau de tube en silicone de 1,5 cm de long sur le câble rouge du support de pile jusqu'à ce que l'isolation soit dans la moitié du tuyau en silicone.
Coupe les fils qui dépassent.
14
Slide a silicone tube of 1.5 cm on the battery case's red cable until the insulation is halfway in the silicone tube.
Cut the loose threads.
15
Stecke den Silikonschlauch mit dem roten Kabel auf den «+ BAT» – Stift auf der Leiterplatte.
15
Branche le tuyau en silicone avec le fil rouge sur la broche "+ BAT" du circuit imprimé.
15
Connect the silicone tube with the red cables to the "+BAT" pin on the printed circuit.
16
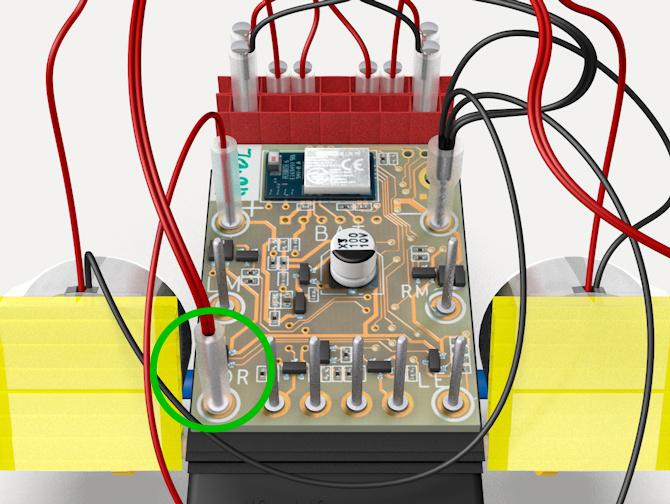
Stecke auf die roten Kabelenden der LDR-Doppellitze ein 1.5 cm langes Stück Silikonschlauch, bis die Isolation in der Mitte des Schlauches ist.
Schneide mit der Schere die hervorstehenden Drähtchen weg.
Stecke den Schlauch mit der Litze auf den
«LDR» – Stift auf der Leiterplatte.
16
Mets un morceau de tuyau en silicone de 1,5 cm de long au bout du câble rouge du brin double du LDR jusqu'à ce que l'isolation soit au milieu du tuyau.
Coupe les fils qui dépassent avec des ciseaux.
Branche le tube avec le brin sur la broche "LDR" sur le circuit imprimé.
16
Slide a silicone tube of 1.5 cm on the tip of the LDR's red cable with 2 threads until the insulation is halfway in the silicone tube.
Cut the loose threads with scissors.
Connect the tube with the threads to the "LDR" pin on the printed circuit.
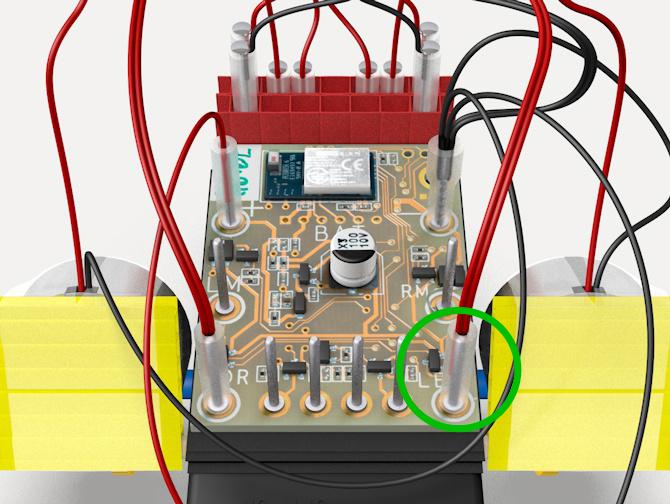
17
Stecke auf die Kabelende der LED-Doppellitze ein
1.5 cm langes Stück Silikonschlauch, bis die Isolation in der Mitte des Schlauches ist.
Schneide mit der Schere die hervorstehenden Drähtchen weg.
Stecke den Schlauch mit der Litze auf den
«LED» – Stift auf der Leiterplatte.
17
Mets un morceau de tuyau en silicone de 1,5 cm de long au bout du câble rouge du brin double du LED jusqu'à ce que l'isolation soit au milieu du tuyau.
Coupe les fils qui dépassent avec des ciseaux.
Branche le tube avec le brin sur la broche "LED" sur le circuit imprimé.
17
Slide a silicone tube of 1.5 cm on the tip of the LED's red cable with 2 threads until the insulation is halfway in the silicone tube.
Cut the loose threads with scissors.
Connect the tube with the threads to the "LED" pin on the printed circuit.
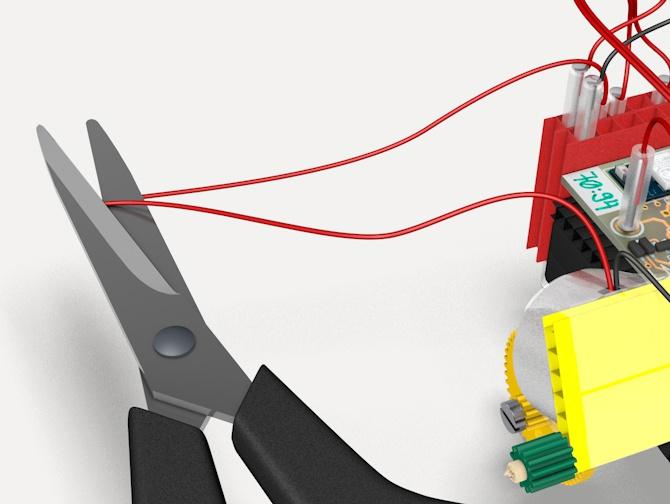
18
Halbiere das rote Kabel des linken Motors, isoliere
1 cm ab, verdrehe die Drähte und stecke sie in ein
1.5 cm langes Stück Silikonschlauch.
18
Coupe le fil rouge du moteur gauche en deux, dénude 1 cm de chaque partie, tord les fils et insère-les dans un morceau de tube en silicone de 1,5 cm de long.
18
Halve the left motor's red cable, strip 1cm of insulation on both sides, twist the wires and insert them in a piece of silicone tube of 1.5 cm.
19
Stecke den Silikonschlauch auf den Stift des linken Motors auf der Leiterplatte.
Der Stift ist mit «LM» bezeichnet.
19
Mets ce tube en silicone sur la broche du moteur gauche du circuit imprimé.
La broche est marquée "LM".
(left motor = moteur gauche).
19
Connect this silicone tube on the left motor's pin on the printed circuit.
The pin is named "LM".
20
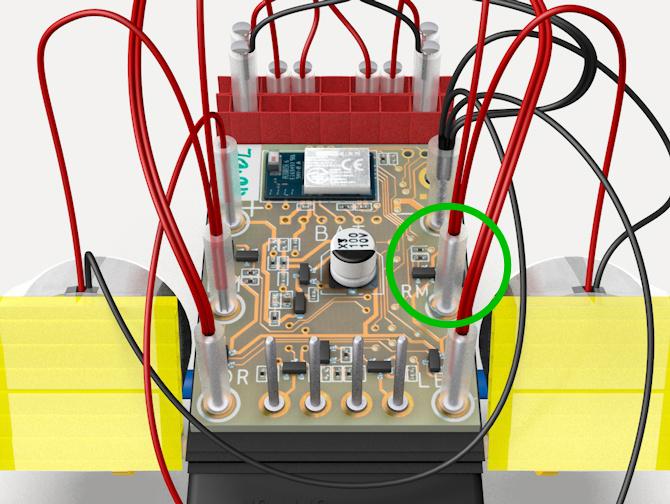
Mache das Gleiche mit dem rechten Motor und stecke den Silikonschlauch auf den Stift des rechten Motors auf der Leiterplatte.
Der Stift ist mit «RM» bezeichnet
20
Fais de même avec le moteur droit et mets le tube en silicone sur la broche du moteur droit sur le circuit imprimé.
La broche est marquée "RM".
(right motor = moteur droit)
20
Repeat so with the right motor and connect the silicone tube to the right motor's pin on the printed circuit. Fais de même avec le moteur droit et mets le tube en silicone sur la broche du moteur droit sur le circuit imprimé.
The pin is named "RM".
21
Schiebe den Schalter des Batteriehalters auf «ON».
Nun leuchtet die grüne LED auf der Leiterplatte.
21
Mets l'interrupteur du porte-piles sur "ON".
La LED verte sur le circuit imprimé s'allume alors.
21
Set the battery's case switch to "ON".
The green LED on the printed circuit now lights up.
22
![]()
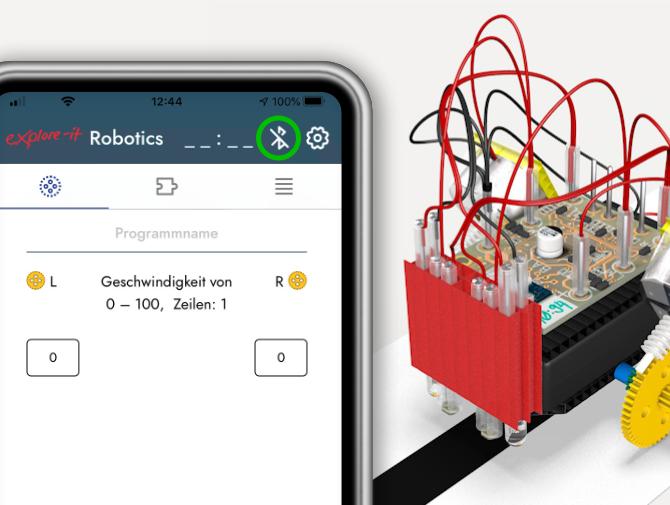
Verbinde dein Handy oder Tablet mit dem Roboter und lass ihn starten und stoppen
Drücke auf das Bluetooth-Icon deiner App (grüne Markierung).

22
![]()
Connecte ton téléphone ou ta tablette au robot et laisse-le démarrer et s'arrêter
Appuie sur l'icône Bluetooth de ton application (marquage vert).
22
![]()
Connect your smartphone or tablet to the robot and let it start and stop.
Click on the Bluetooth icon in the app (green mark)
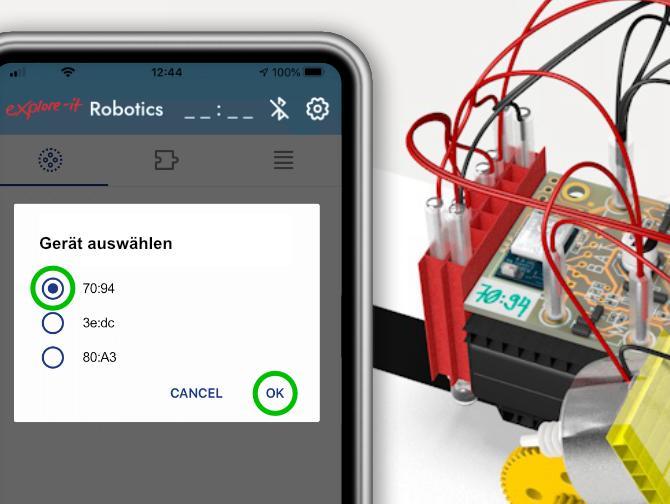
23
Wähle deinen Roboter aus und drücke «OK».
Wenn du mehrere Möglichkeiten hast, wählst die Bezeichnung aus, die auf der weissen Fläche des Minicomputers auf deinem Roboter zu sehen ist.
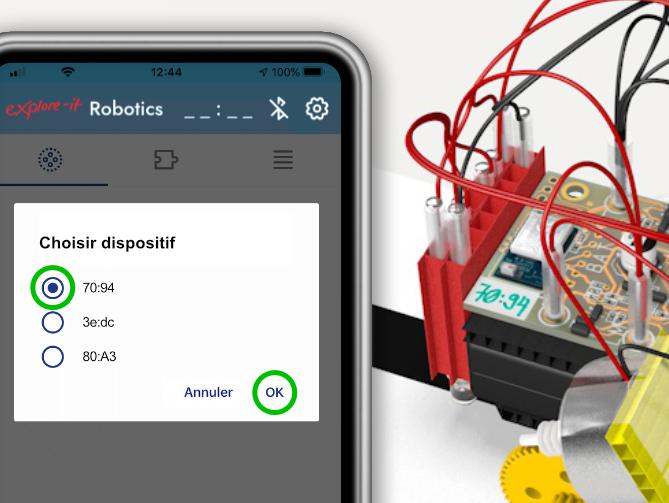
23
Sélectionne ton robot et appuie sur "OK".
Si tu as plusieurs possibilités, sélectionne le nom qui apparaît sur la zone blanche du mini-ordinateur de ton robot.
23
Select your robot and press on "OK".
If you have several options, select the name in the white zone of your robot's mini-computer.

24
Nun erscheint oben rechts auf deinem Bildschirm die Bezeichnung deines Roboters.
Immer wenn du diese Bezeichnung siehst, besteht eine Verbindung von deinem Handy oder Tablet zu deinem Roboter.
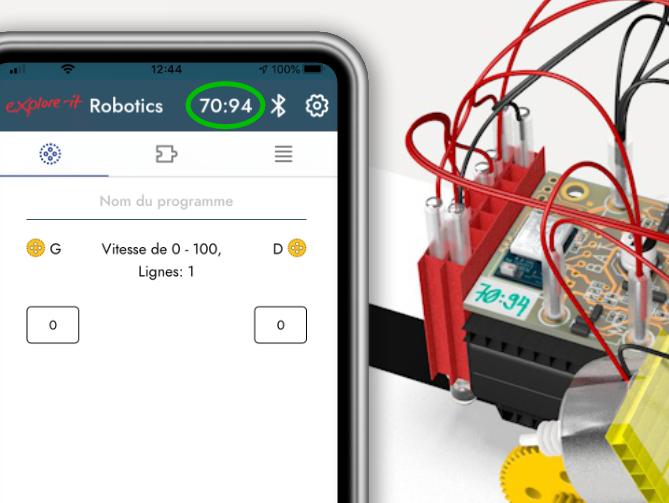
24
Maintenant, le nom de ton robot apparaît en haut à droite de ton écran.
Chaque fois que tu vois ce nom, il y a une connexion entre ton téléphone ou ta tablette et ton robot.
24
Now, the name of your robot appears on the top right of your screen.
Each time you see that name, your phone or tablet is connected to your robot.

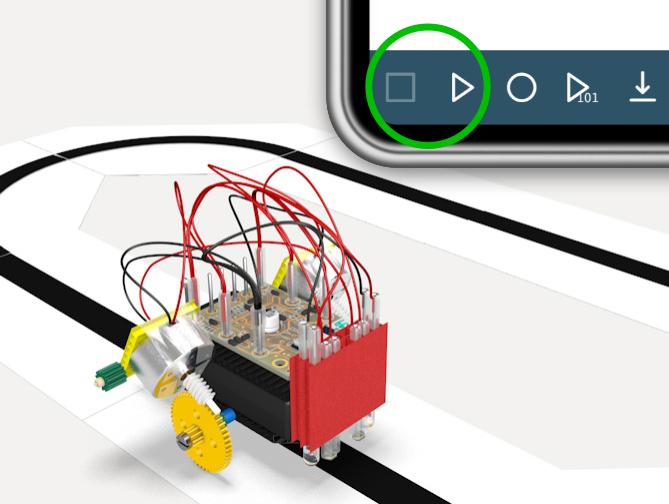
25
Nun kannst du mit dem Button «Start» (Dreieck) und dem Button «Stopp» (Quadrat) deinen Roboter starten und stoppen, wie du willst: Du kannst die Motoren also aus der Ferne ein- und ausschalten.

25
Tu peux maintenant utiliser le bouton "démarrage" (triangle) et le bouton "arrêt" (carré) pour démarrer et arrêter ton robot comme tu le souhaites : en d'autres termes, tu peux allumer et éteindre les moteurs à distance.
25
You can now press the "start" button (triangle) and "stop" bottom (square) to start and stop your robot as you wish: in other words, you can switch the motors on and off remotely.
26
![]()
Zeichne die Fahrt deines Roboters auf und überprüfe, ob er «gut gelernt» hat
Baue mit den Papierschienen eine spannende Bahn.
Stelle den Roboter darauf.
Prüfe mit «Start» und «Stopp», ob der Spurensucher genau der Spur folgt.
Zähle, wie viele Sekunden die Fahrt dauert.
26
![]()
Enregistre le parcours de ton robot et vérifie s'il a "bien appris"
Construis une piste intéressante avec des rails en papier.
Place le robot dessus.
Utilise les touches "démarrage" et "arrêt" pour vérifier si le chercheur de trace suit exactement la piste.
Compte le nombre de secondes que dure le voyage.
26
![]()
Record your robot's journey and check wether it has "learned well"
Build an exciting track using the paper rails.
Place the robot on it.
Use "start" and "stop" the check wheter the track-follower follows the track exactly.
Count how many seconds the journey takes.

27
Öffne das Menü «Einstellungen».

27
Ouvre le menu "Paramètres".
27
Open the "settings" menu.

28
Stelle bei «Dauer» die Anzahl Sekunden ein, welche die Fahrt gedauert hat.
Den Wert «1» bei «Intervall» veränderst du nicht.
Schliesse das Menü «Einstellungen» mit «x».

28
Définis le nombre de secondes que le voyage a duré dans "Durée".
Ne change pas la valeur "1" dans "Intervalle".
Ferme le menu "Paramètres" avec "x".
28
Under "Duration", set the number of seconds the journey took.
Do not change the value "1" under "Interval".
Close the "settings" menu by pressing x.

29
Drücke den Button «Aufzeichnen» (Kreis).
Der Roboter wird nun automatisch gestartet und fährt so viele Sekunden, wie du eingestellt hast - und stoppt dann wieder.
Die Fahrt wird aufgezeichnet und als Programm auf dem Minicomputer gespeichert.
Das Programm bleibt solange gespeichert, bis du eine neue Fahrt aufzeichnest.
29
Appuie sur le bouton "enregistrer" (cercle).
Le robot démarre alors automatiquement et roule pendant le nombre de secondes que tu as défini, puis s'arrête.
Le parcours est enregistré et sauvegardé sous forme de programme dans le mini-ordinateur.
Le programme reste enregistré jusqu'à ce que tu enregistres un nouveau parcours.
29
Press the "Record" Button (circle).
The robot will now start automatically and run for the number of seconds you have set and then stop again.
The run is recorded and saved as a programme on the minicomputer.
The programme remains saved until you record a neu run.

30
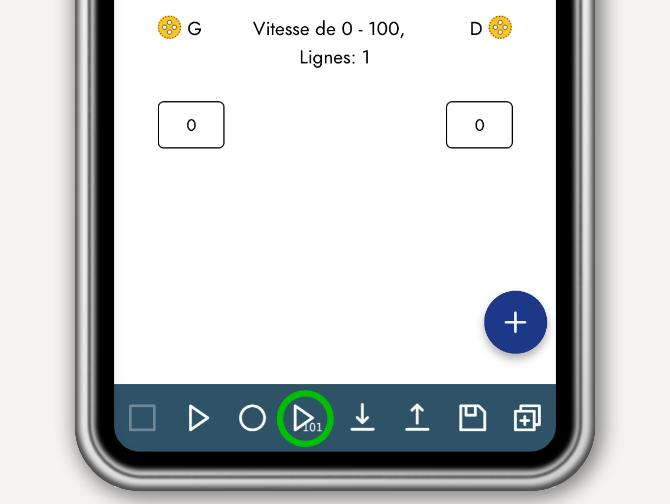
Stelle den Roboter neben deine Bahn. Er soll nun zeigen, dass er die Fahrt aufgezeichnet hat und ohne Papierlinie fahren kann.
Starte die Fahrt des Roboters mit dem Button «Wiedergeben» (Dreieck101).
30
Place le robot à côté de ta piste. Il doit maintenant montrer qu'il a enregistré le trajet et qu'il peut conduire sans ligne de papier.
Commence le voyage du robot avec le bouton "play 101" (triangle 101).
30
Place the robot next to your track. It should now demonstrate that it has recorded the route and can drive without a guide line.
Start the robot's journey by clicking "Play 101" (triangle 101).
31
![]()
Experiment
Versuche das Gleiche mit anderen Strecken.
Stelle deinem Roboter eine möglichst schwierige Aufgabe.
31
![]()
Expérience
Essaie la même chose avec d'autres itinéraires.
Pose à ton robot une tâche aussi difficile que possible.
31
![]()
Experiment
Try the same thing with other routes.
Set your robot the most difficult task possible.
32
![]()
Willst du sehen, was der Roboter aufgezeichnet hat?
32
![]()
Tu veux voir ce que le robot a enregistré?
32
![]()
Do you want to see what your robot recorded?

33
Wenn es dich interessiert, wie das Programm aussieht, das der Roboter aufgezeichnet hat, musst du es auf dein Handy oder Tablet laden.
Drücke auf den Button «Download» (Pfeil nach unten).
Warte bis der Download bestätigt wird.
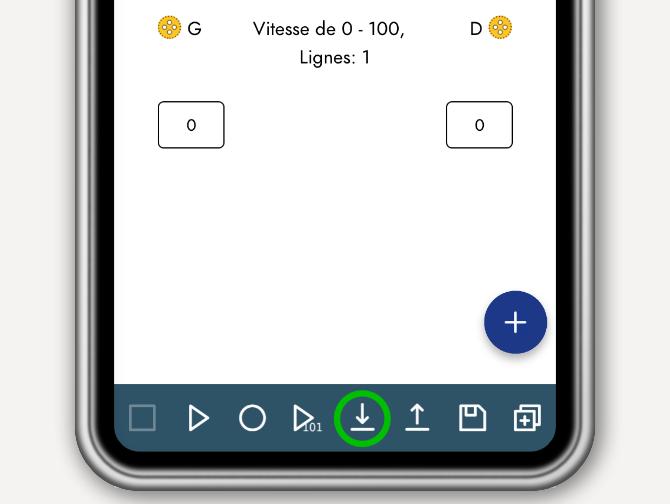
33
Si tu es intéressé par le programme que le robot a enregistré, tu dois le télécharger sur ton téléphone ou ta tablette.
Appuie sur le bouton "Download" (flèche vers le bas).
Attends que le téléchargement soit confirmé.
33
If you're interested in seeing the programme the robot has recorded, you'll need to download it to your smartphone or tablet.
Press the "download" button (down arrow).
Wait until the download is confirmed.
34
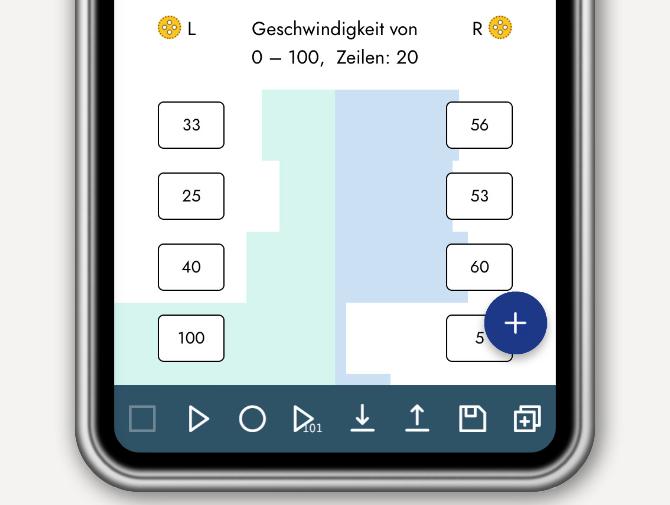
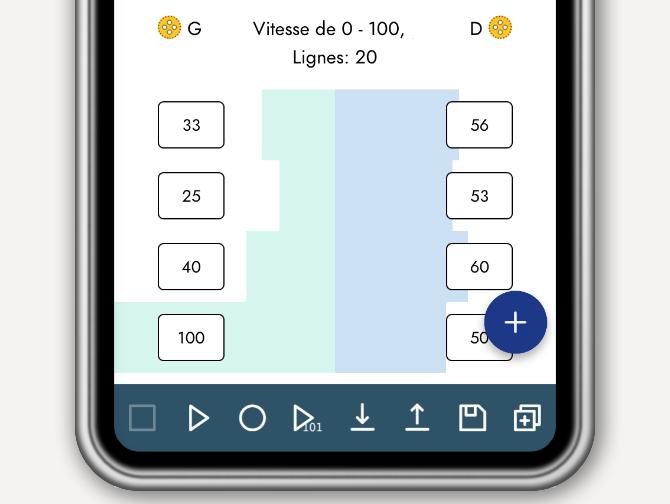
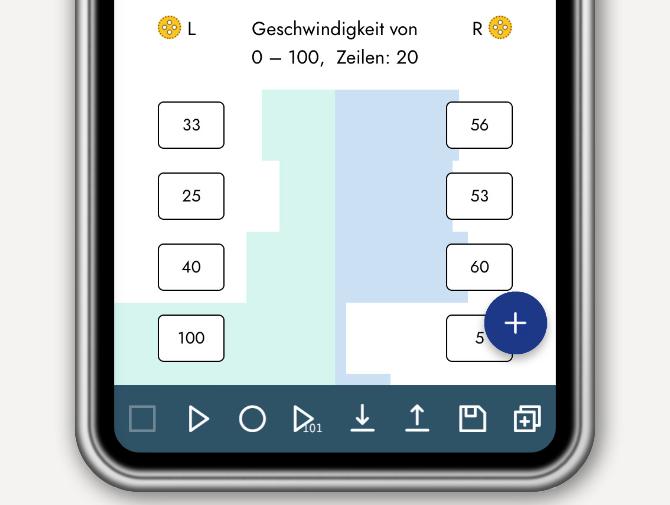
Auf deinem Handy oder Tablet siehst du nun das aufgezeichnete Programm.
Überlege, wie es zu verstehen ist!

34
Sur ton téléphone portable ou ta tablette, tu verras maintenant le programme enregistré.
Réfléchis à comment fonctionne ce programme!
34
You can now watch the recorded programme on your smartphone or tablet..
Think about how it works!

35
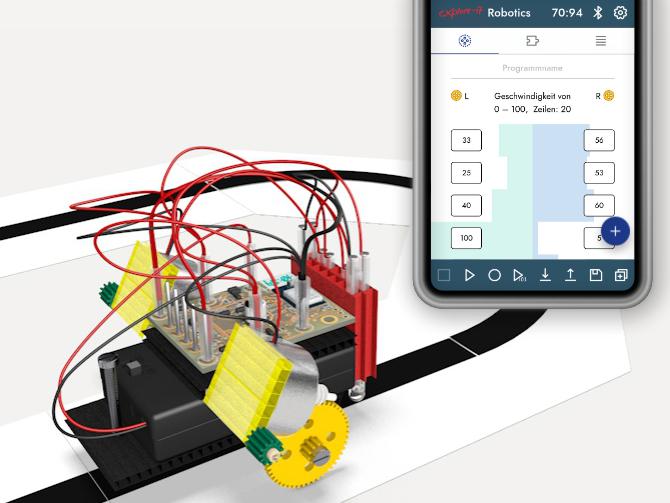
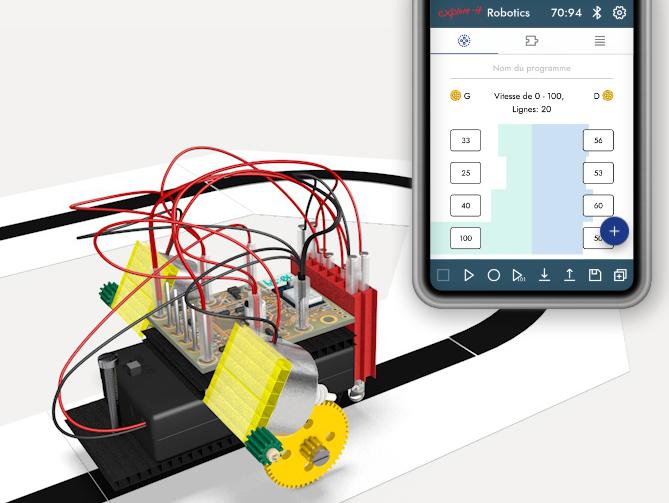
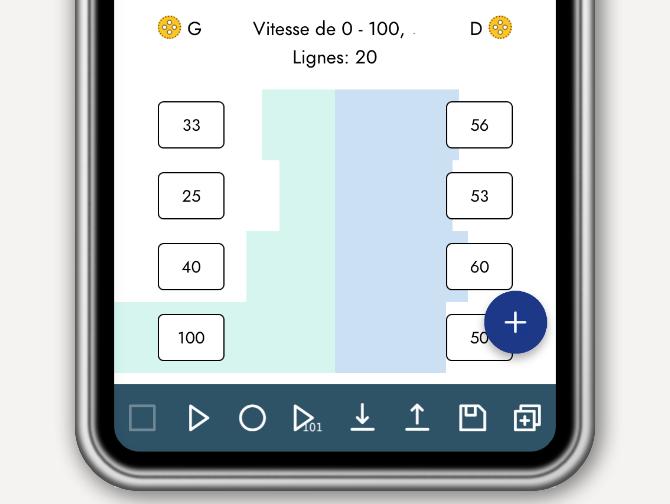
Es besteht aus vielen Zeilen mit je zwei Zahlen.
Die Zahlen sind Werte für die Geschwindigkeit der Motoren. Die Werte liegen zwischen 0 und 100.
100 ist der Wert für die maximale Geschwindigkeit.
Die linke Spalte zeigt die Werte für den linken Motor, die rechte die Werte für den rechten Motor.
Aufgrund der Zahlenwerte kannst du erkennen, wann der Roboter geradeaus, eine Kurve nach links oder nach rechts gefahren ist und ob die Kurve eng oder weit war.
Und du siehst, ob der Roboter eher schnell oder eher langsam unterwegs war.
35
Il se compose de plusieurs lignes comportant chacune deux nombres.
Les nombres sont des valeurs pour la vitesse des moteurs. Les valeurs sont comprises entre 0 et 100.
100 est la valeur de la vitesse maximale.
La colonne de gauche indique les valeurs pour le moteur gauche, la colonne de droite indique les valeurs pour le moteur droit.
Grâce aux valeurs numériques, tu peux voir si le robot roule tout droit ou fait une courbe à gauche ou à droite ou si la courbe était serrée ou large.
Et tu peux voir si le robot se déplaçait plutôt rapidement ou plutôt lentement.
35
Il se compose de plusieurs lignes comportant chacune deux nombres.
Les nombres sont des valeurs pour la vitesse des moteurs. Les valeurs sont comprises entre 0 et 100.
100 est la valeur de la vitesse maximale.
La colonne de gauche indique les valeurs pour le moteur gauche, la colonne de droite indique les valeurs pour le moteur droit.
Grâce aux valeurs numériques, tu peux voir si le robot roule tout droit ou fait une courbe à gauche ou à droite ou si la courbe était serrée ou large.
Et tu peux voir si le robot se déplaçait plutôt rapidement ou plutôt lentement.
36
Weil bei «Intervall» (im Menü «Einstellungen»)
die Zahl 1 eingetragen ist, wurde pro Sekunde Fahrt eine Programmzeile aufgezeichnet.
Die Anzahl Zeilen entspricht somit der Länge der aufgezeichneten Fahrt in Sekunden.
36
Etant donné que sous "Intervalle" (dans le menu "Paramètres") la valeur est réglée sur 1, une ligne de programme est enregistrée par seconde de voyage.
Le nombre de lignes correspond donc à la durée du trajet enregistré en secondes.
36
Etant donné que sous "Intervalle" (dans le menu "Paramètres") la valeur est réglée sur 1, une ligne de programme est enregistrée par seconde de voyage.
Le nombre de lignes correspond donc à la durée du trajet enregistré en secondes.